未来への取り組み
モータの協調制御技術
小型コンピュータを内蔵したインテリジェントモータ®なら無線ネットワーク経由の遠隔通信でリアルタイムかつ高精度な協調制御を可能に。
昨今、IoT(Internet of Things)の普及に伴い、様々なロボットが無線ネットワーク経由で、遠隔から制御できるようになってきています。また、市場拡大が見込まれるロボット業界では、ロボット単体での作業から、複数ロボットでの協調作業への進化が求められてます。
しかし、高精度なリアルタイム制御を必要とするロボットを、無線ネットワーク経由で遠隔から協調制御しようとすると、通信遅延によってロボットからのデータや制御コマンドが時間どおりに到着しないため、正確な協調制御が実現できませんでした。
NIDECは、NECとのオープンイノベーションとして、同社が有する無線通信技術とNIDECのモータ間同期技術を融合させることで、リアルタイムかつ高精度なロボットの協調制御を実現しました。
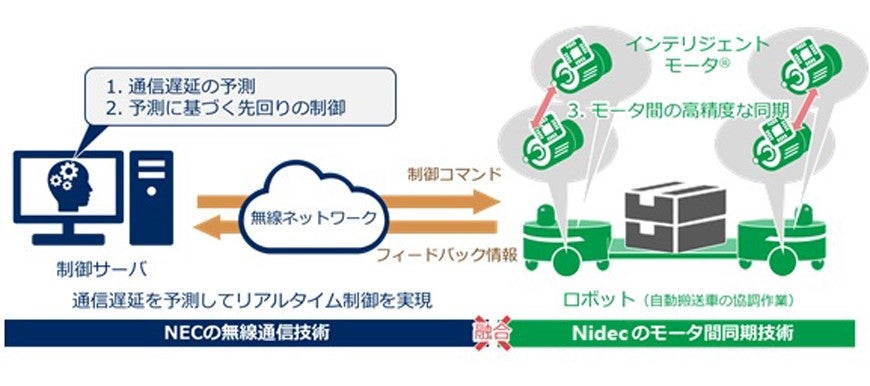
この無線を用いたインテリジェントモータの協調制御は、Wi-FiやLTEなど様々な無線ネットワークにおける遅延発生の高精度な確率モデルを発見し、この確率モデルを活用して通信遅延の予測を実現しています(注3)。

この通信遅延予測技術により、インテリジェントモータ®からフィードバックされた情報(位置、速度、トルク等)がどれだけ時間が経過した情報であるか、インテリジェントモータ®へ送信する制御コマンド(位置や速度の指令)がどれだけ遅延して到着するか予測することが可能となります。
通信遅延予測が可能になることで、制御コマンドが到着する時点におけるインテリジェントモータ®の状態を正確に推定するととともに、推定した未来の状態に基づいて先回り制御(注4)を行い、通信遅延を含む遠隔からのリアルタイム制御が実現できるようになります。

これらの特徴を持つ通信技術と小型コンピュータが内蔵されたNIDECのインテリジェントモータ®間を同期させる技術により、複数のインテリジェントモータ®同士を密に連携させることで高精度な同期を実現し、インテリジェントモータ®を搭載した複数ロボットの協調制御を実現します。また、従来ロボット側に必要だった高価な制御用コンピュータが不要となります。その結果、例えば工場や倉庫の搬送業務においては、高コストの大型自動搬送車ではなく、低コストの小型自動搬送車を複数台組み合わせ協調させることで様々な形状・重量の荷物を搬送可能になり、オペレーションコストの低減に繋がります。

本技術の応用事例として、工場や倉庫における自動搬送車、警備ロボット、災害時の調査ロボット、検査や宅配のためのドローンの遠隔制御など、様々な領域の社会システムに応用するための実証・製品化を進めています。

———————————————
(注1)インテリジェントモータ®
NIDECが開発した小型コンピュータを内蔵したモータ。無線ネットワークで簡単に制御可能であるとともに、位置、速度、トルクなど様々なモータ情報を取得することができます。
(注2)搬送効率
自動搬送車を遠隔から制御して、所定の経路から外れないように搬送させたときの所要時間
(注3) 通信遅延予測
通信ネットワークを、高遅延状態と低遅延状態の二状態で定義し、この二つの遅延状態の遷移モデルをある分子の高エネルギー状態と低エネルギー状態の状態遷移の確率モデルで高精度に予測できることを発見。実際のネットワーク環境で、最新の同種の研究成果よりも予測誤差を約30%改善できることを実証しました。
(注4) 先回り制御
制御系の未来の状態を予測して制御する手法。
「インテリジェントモータ」はNIDEC株式会社の日本における登録商標です。