モータ用語集
運動方程式
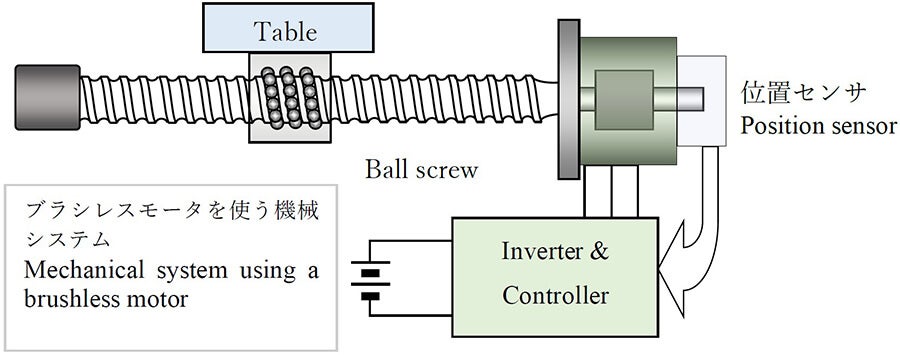
モータやその負荷の回転速度を計算するための基本的な微分方程式であり,図のような対象では,次式のように記述される。

ここで,Jはロータとスクリューの慣性モーメントおよびテーブルの質量による等価慣性モーメントの合計である。Tはモータが発生するトルクであり,その計算はモータのパラメータ,電源電圧,インバータとコントローラおよび位置センサの情報からから計算される。そのために運動方程式は連立微分方程式になる。
上の方程式をdynamic equationと呼んでもよいが,この用語は時間的に変化する様々の効果・現象を含む系の方程式をさすことが多い。