2-1-2 回転原理の基礎
2-1節の最終目標は、私たちが知っている、鉄心のあるDCモータの回転原理を知ることです。
しかし、それにはモータに関する基礎的な知識が必要です。
そこで、最初は理科や物理の教科書と同じように、ロータに鉄心がないモータについて考えます。
同時に、鉄心のないモータが理論だけでなく、実際にモータとして実用化されていることも確認しましょう。
とはいえ、ここでは「本格的な技術を分かりやすく」をモットーとしています。単なる復習でなく、実務に役立つお話もしていきましょう。
BLI則
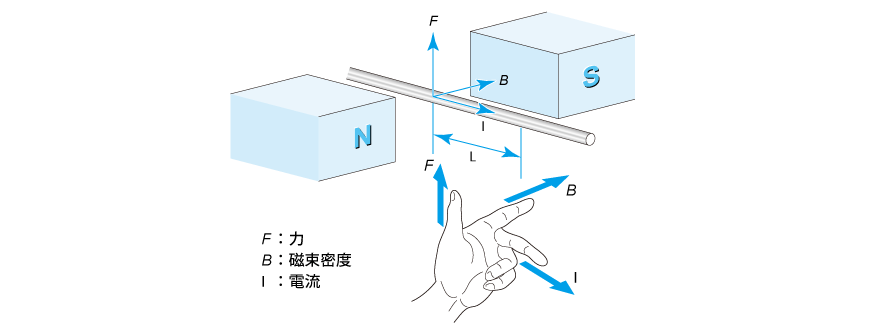
図2.2 のように、空中に磁界Bがあって、磁界を横切るようにおいた電線に電流Iを流すと、電線に力Fが発生します。この力の強さは次式で与えられ、BLI則ともいいます。
F = BLⅠ ……(2.1)
F:力[N] B:磁束密度[T]
L:磁界中の電線長[m] Ⅰ:電流[A]
また、電線に働く力の向きは、フレミングの左手の法則によって図の方向になります。
指と記号との対応は、親指から順に「F・B・Ⅰ」と覚えたり、中指から逆順に「電・磁・力」と記憶しましょう。
記号のBは、磁力線の強さを表し、磁束密度と呼びます。磁力線は想像上のもので、直接確認することはできません。磁束密度の国際単位(SI)は、T(テスラ)で、MKS単位の[Wb/m2]と同じです。
1テスラとは、1平方メートルあたり1ウェーバ[Wb]の磁束があるときの磁界の強さです。
物理学者や磁石メーカでは、もう一つの単位として、ガウス[G]も使われています。1Tは、10,000Gです。
鉄心のないモータの回転原理
図2.3 のように電線をコイルにして、図の向きに電流Iを流すと、コイルの左側には上向き、コイルの右側には下向きの力が発生して、コイルが回転します。これが学校で学習した直流モータの回転原理です。
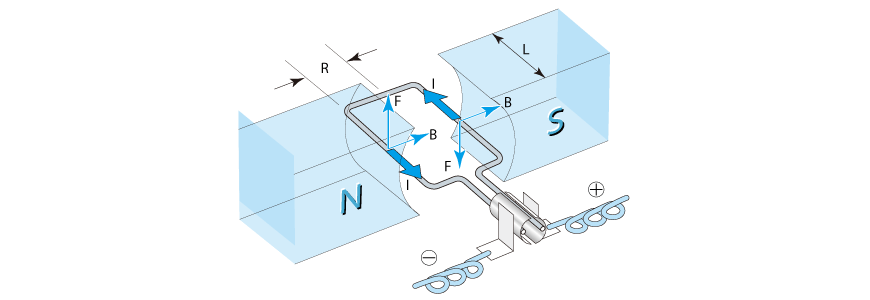
T =2RF = 2RNBLⅠ ……(2.2)
T:トルク[Nm] R:回転半径[m] N:コイル巻数
L:磁路幅[m]
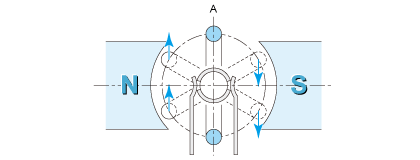
しかしコイルが一組では、図2.4 のAの位置にコイルがきたとき、どちらに回るかが決まらなくなります。 そこで、数組のコイルを用いて、回転に合わせて電流を順に切り替えていくと、コイル群は連続回転します。
最初に、コイル1個だけのモータを考えます。(2.2)式を基に、磁束の分布、コイルの半径と長さ、電流の流れ方を考慮すると、このときのトルクT(torque、回転力)は、電流Iに比例して次の式で表すことができます。その比例係数KTをトルク定数と呼びます。
T = KTI ……(2.3)
I:コイル電流[A] KT:トルク定数[Nm/A]
この式は、DCモータでは、トルクが電流に比例することを表しています。これはDCモータが持つ、極めて重要な性質の一つです。
トルク定数は、(2.2)式と(2.3)式より次式となります。
KT= 2RNBL[Nm/A] ……(2.4)
実際のモータでは後述の図2.16 に見るように、複数のコイルがあって、それらが花びらのようにつながり、モータ端子の電流はモータ内を2つに分かれて流れます。このときには全コイルの巻数をNとして、トルク定数はやはり(2.4)式になります。
クリップモータを作る
簡単なモータとして、中学の教科書にあるクリップモータを作ってみましょう。
材料は、文具店やホームセンターで入手できます。
作り方は図2.5 を参考にしてください。エナメル線を巻いてコイルを作ります。
エナメル線は、太さ0.4~0.6mm、巻数は15~30回程度が良いでしょう。コイルは、ペットボトルのキャップを利用するときれいに巻けます。巻いた後、コイルができる限り回転軸に対して対称になるよう心がけてください。
コイル端部のエナメルの被覆をはがすときは注意が必要です。片側はすべてはがしますが、反対側は拡大図のように半分だけはがします。これが、クリップモータのポイントです。
はがす範囲とコイルとの角度にも注意してください。
コイルを安全ピンに差し込み、どちらかに軽く回してやれば、回転を続けます。
コイルが対称にできていれば、逆方向にも回転しますが、偏っていると一方向にしか回転できません。
太さ0.4~0.6mmのエナメル線を15回~30回巻く。エナメルを全部
はがすエナメルを半分だけはがす。 安全ピンを消しゴムにさす。