1-3-3 交流モータ
交流モータ(alternating-current motor)は、英語では短縮して AC motor と表記することが多いので、日本語でも AC モータと表すことが多く、本書でもこの用法に従います。
AC モータを分類すると、整流子型モータ、同期モータおよび誘導モータに大別されます。
同期モータおよび誘導モータはともに、回転磁界により回転速度が決定する AC モータです。
ここで回転磁界とは、ステータ巻線に三相交流や二相交流などの多相交流電流を流した際に、発生した磁界が多相交流電流の周波数で決まる回転速度(=同期速度)で回転する現象をいいます。回転磁界によってロータが吸引されて回転しますが、その回転法の相違によって AC モータが分類されます。
回転磁界形 AC モータ(同期モータ、誘導モータの総称)には、家庭に二本線で配電されているAC100Vを電源とするモータと、工場等に配電されている三本線の AC200V を電源とするモータとに大別されます。
前者を単相交流モータ(single-phase motor)、後者を三相交流モータ(three-phase motor)と呼びます。
最近では、三相交流モータをインバータ(inverter)という半導体素子を用いた電力変換回路によって駆動する機会が多くなってきました。インバータによって電圧と周波数を制御して、目的にかなった回転速度とトルクで運転するためです。
[3]-(1) 整流子型モータ
整流子型モータ(commutator motor)とは、ロータとして図1.12 に示す整流子型ロータを使う モータの総称です。現在でも大量に使われているのが、ユニバーサルモータ(交流シリーズ、交流直巻モータともいう)の名前で呼ばれるモータの類です。
主な用途は、電気掃除機、電動工具およびジューサーです。つまり、単相交流を電源として高速運転が必要な分野です。
ここでユニバーサル(universal)という言葉には、交流でも直流でも回転する(つまりは交直両用)という意味が込められています。
構造は、原理的には直流直巻モータと同じですが、交流の場合は次を考慮しなければなりません。
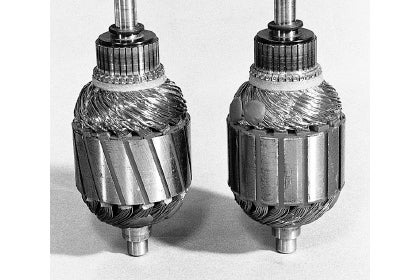
図1.12整流子型ロータ
巻線をもち複数の銅片で構成される整流子を備える。
①直流の場合はステータの磁束は一定でしたが、交流の場合には変動します。従って、変動する磁束によって発生する渦電流を、鉄心を絶縁積層して軽減する必要があります。
②電圧降下は直流の場合には抵抗による降下のみでしたが、交流では、電磁誘導による位相ずれも生じるため力率が悪化し、出力は減少します。
[3]-(2) 同期モータ
同期モータ(synchronous motor)は、回転速度が同期速度に等しいモータのことで、以下の3種類があります。
[3]-(2)-① リラクタンスモータ
リラクタンスモータ(reluctance motor)は、ステータに分布巻ステータ(図1.13左)を、ロータに突(凸)極かご型ロータ(図1.14右)をそれぞれ使用します。
始動時には誘導モータとして回転し、運転時には電源周波数に同期して回転するもので、50Hz地帯と60Hz地帯で回転速度が異なります。起動トルクが比較的大きいモータです。また、このモータはリアクションモータとも呼ばれます。
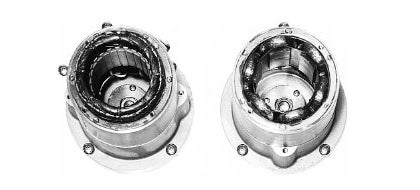
(右)凸極かご型ロータ(リラクタンスモータ用)。
導体として銅、黄銅、アルミニウムを使用。
[3]-(2)-② ヒステリシスモータ

着磁しない弱い永久磁石鋼。
ヒステリシスモータ(hysteresis motor)は、ステータに分布巻ステータ(図1.13左)を、ロータに半硬磁鋼ロータ(図1.15)をそれぞれ使用します。
ヒステリシス特性を利用して回転させるもので、回転ムラや振動が非常に少ないモータです。また、起動トルクと停止トルクの差がないため、一定負荷の条件下での運転が望ましいといえます。特殊なヒステリシスリングを保有しているメーカでないと製造できません。
[3]-(2)-③ インダクタ型モータ
インダクタ型同期モータ(inductor-type synchronous motor)の動作原理は、ステータコイル(電磁石)に流す電流の周波数にロータの動きを同期させ、吸引および反発を行いながら回転運動に変えていくものです。
つまり、ロータの回転速度が、電流の周波数で一意に決まる回転速度(同期速度)の整数分の1になります。ロータ構造から
- ・クローポール型(claw-pole motor)
- ・ハイブリッドステッピングモータ型(超低速同期モータ)(slow-synchronous motor)
の2種類に分類できます。
クローポール型は、モータの構造とギアヘッドの組み合わせにより、さまざまな速度のものが用意されています。
クローポール型の用途として、遊戯機器(パチンコ機)、複写機、防犯カメラ駆動、記録計、自動カーテン、バルブ開閉などがあります。ハイブリッドステッピングモータ型の用途は、主として製造用機械です。
同期と非同期
回転磁界型モータを語るときに、同期・非同期という言葉がよく使われます。これは「交流の周波数と同期して回るのか、同期しないのか」という技術的要素に関係します。次に、重要な用語を記します。
◎同期速度(synchronous speed)N0
同期速度は、回転磁界型交流モータで重要な意味をもつパラメータです。周波数(frequency)と極数(number of magnetic poles)によって決まります。

電力会社が配電する電気の周波数は、富士川より西で60Hz、富士川より東では50Hzです。
回転磁界型モータの最小極数は2ですから、電力会社の電源をそのまま利用するときの同期速度は、富士川より西で秒速60回転(分速3600回転)が最高です。
同期速度で回るモータの総称を、同期モータ(synchronous motor)と呼びます。
同期速度より遅い速度で回るのが、非同期モータ(asynchronous motor)です。
[3]-(3) 誘導モータ(induction motor)
通常は、誘導モータやinduction motorと呼ばれますが、非同期モータ(asynchronous motor)という場合もあります。
回転速度が同期速度よりも若干遅いモータの総称です。以下の3種類があります。いずれの場合も、ステータには分布巻ステータ(図1.13左)を使用します。
[3]-(3)-① かご型誘導モータ
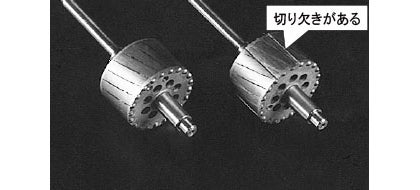
「かご」だけが残る。
左がかご型誘導モータ、右はリラクタンスモータの
ロータ
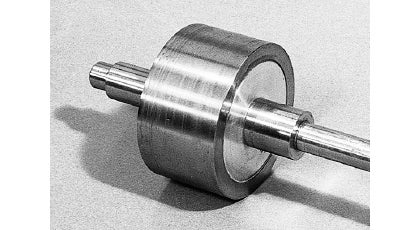
かご型誘導モータ(squirrel-cage rotor type induction motor)のロータには、かご型ロータ(図1.14左)を使用します。
工業用の汎用動力モータがこの形式です。かご型ロータを硝酸に浸して鉄分を溶解すると、図1.16のようにアルミニウムの「かご」だけが残ります。ロータのかご型導体の形状と材質を調整することによって、特性曲線を微妙に調整することも可能です。
[3]-(3)-② 渦電流モータ
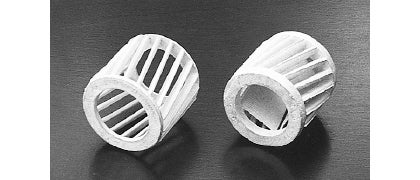
円筒状の鉄の塊(かたまり)を主要材料とする。
渦電流モータ用
渦電流モータ(eddy-current motor)のロータには、軟鋼ロータ(図1.17)を使用します。起動時に大きなトルクを発生し、速度の上昇とともにトルクが低下する特性を有します。
[3]-(3)-③ 巻線型誘導モータ
ブラシによって通電するための 3 本の
スリップリングがある
巻線型誘導モータ(Wound-rotor type induction motor)には、巻線型ロータ(図1.18)を使用します。スリップリングを通して接続した可変抵抗器により、モータの特性を変化させることができます。 特に、大型モータに利用されます。
[3]-(3)-④ 単相誘導モータ
上の①~③までは、多相(三相)誘導モータについて説明してきました。
日常生活の中で最も身近にある電源は単相交流電源であり、単相交流で動作する実用的なモータがあれば便利です。単相誘導モータ(single-phase induction motor)は、このような要求を満たすモータであり、出力は数 W から数百 W 程度の小型ものが家庭用、小規模工業用、農業用のモータとして広範に用いられています。単相誘導モータでは、コンデンサモータとくま取りコイル型単相誘導モータが使われています。
[3]-(3)-④-a) コンデンサモータ
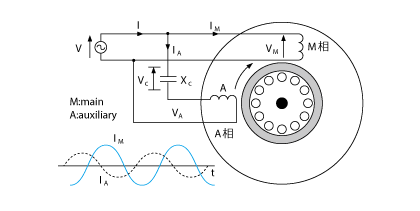

コンデンサモータ
コンデンサモータ(capacitor motor)は図 1.19に示すように、 A 相にコンデンサを挿入して VA が VM より進み位相となるようにしています。
コンデンサモータには、コンデンサCを始動時にだけ挿入するコンデンサ始動型モータ、始動時から一定のCを挿入しておくコンデンサラン型モータ、運転に入ったらコンデンサ容量を切り換えて小さくする二値型コンデンサモータに分類されます。
コンデンサモータは、家電製品の中でも比較的に始動トルクの小さいものに好んで用いられるほか、工業用途として小型ベルトコンベア駆動やFA(Factory Automation)用途でも簡便さとコストの面で用いられています。
[3]-(3)-④-b) くま取りコイル型単相誘導モータ
くま取りコイル型誘導モータ(shaded-pole type single-phase induction motor)は、主巻線の他に、主巻線から電気角で90°より少ない角度だけずれた位置に、短絡された補助巻線を持つ誘導モータです。
補助巻線は、主巻線からの変圧器作用で電圧を誘導して短絡電流を流し、その起磁力と主巻線の起磁力によって回転磁界を発生します。
くま取りコイルに発生する損失のために効率は良くありませんが、構造が簡単なので、ファンモータのような小容量のものに用いられます。
電源による交流モータの分類