NIDECの技術力
新たなサーボ技術への挑戦
大規模化・高精度化していく制御系に対応した
全く新しいサーボ技術の構築に挑む。
製造現場における自動化の恩恵は大きく、加工・搬送・組立などのあらゆる製造工程で自動化が進められています。この自動化の流れの中で、自動化の核となる制御技術も発達してきました。しかし、ロボットや自動機など制御対象が高度な制御を求められるようになっていくと、要求仕様が既存の制御技術では追いつかないレベルに達し、既存技術を洗練させるだけでは対応できない状況が生じてきました。
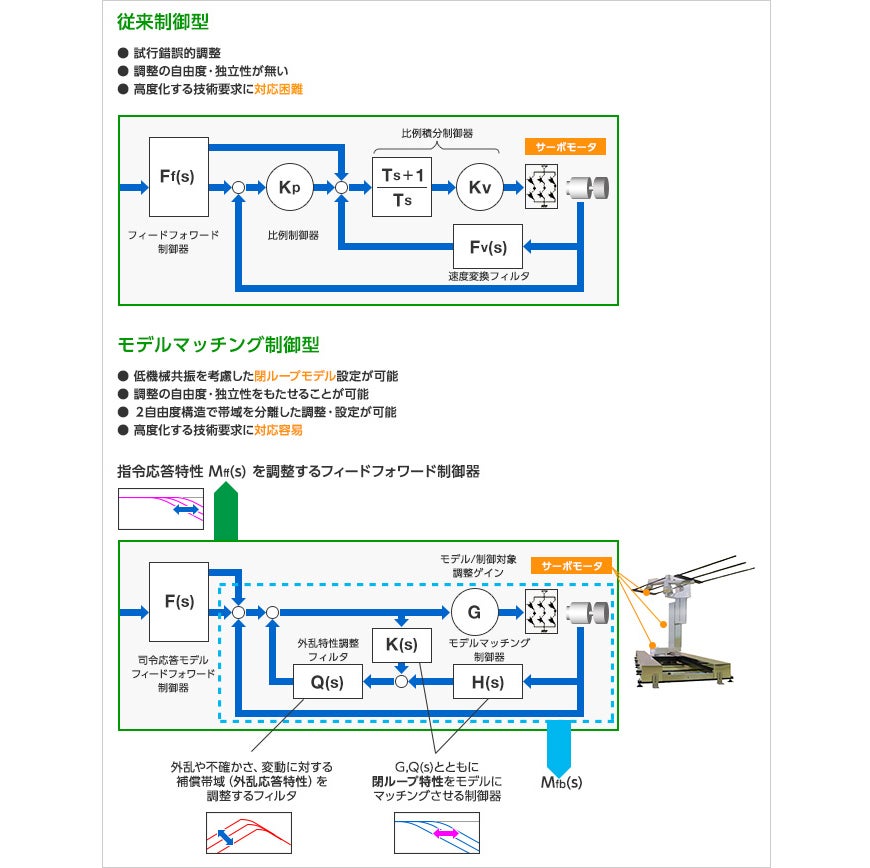
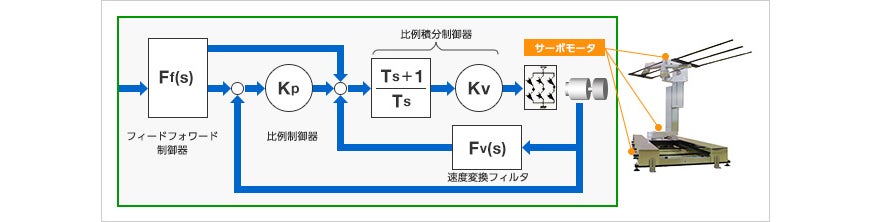
従来、ロボットなどの制御に主に用いられていたのはPID制御と呼ばれる制御アルゴリズムです。制御系が満たすべき目標値と実際の制御対象数値の誤差をP(比例)・I(積分)・D(微分)という3項目の動作フィードバックを行い修正していきます。制御対象についての厳密な検証を経ずに設計をスタートし、制御テストをくり返しながら制御器のパラメータを試行錯誤で調整していく方法を取ります。アナログ/ハードウエア制御であるため応答性の点でも問題なく、航空機の自動操縦をはじめ、モータや油圧システムなどの各種機器・自動車・石油化学・電力などのさまざまな業種で独自進化を遂げながら使用されてきました。しかし、制御系が大規模化・高精度化していくに従って制御器の数が増え、試行錯誤を繰り返すために膨大な時間を必要とするようになり、しかも所要の仕様を満たせないケースが生じてきました。
PID制御が適応できなくなった制御対象のひとつにロボットがあります。ニデックインスツルメンツではさまざまなロボットの開発・製造を行ってきましたが、中でも大きく発達したのが液晶ガラス基板搬送用ロボットです。液晶パネルは最終製品の大型化や製造上の効率化のため、パネルの元になるマザーガラスの寸法が年々大きくなり、最新世代では3畳を超えるほど大きなものになっています。非常に薄く、しかも大型のマザーガラスを運ぶには、搬送用ロボットといえども精密な制御が必要となってきます。ラフな制御ではマザーガラスが割れてしまう可能性があるからです。大型化した液晶搬送用ロボットは機械共振点が下がることで揺れやすくなりますし、アームの伸縮動作や負荷の有無によって負荷変動が大きくなるという問題があります。こうした問題がありつつも、生産効率向上のために精度と速度をアップさせなければなりません。
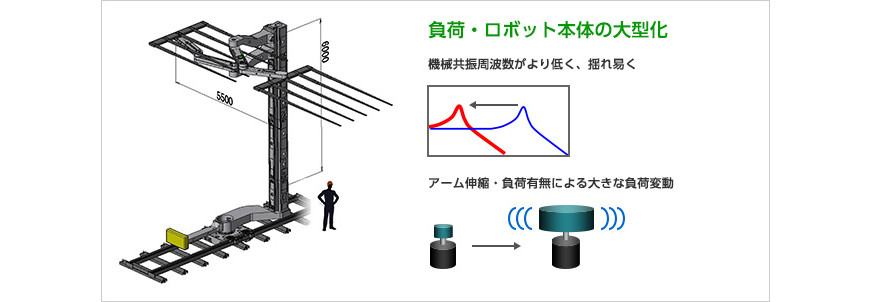
大型ロボットを高精度・高速で動作させるには次のような仕様を満たす必要があります。
- 閉ループ特性:低くなった機械共振に合わせた(適合した)閉ループ特性にする必要がある。
- 外乱応答特性:大きな負荷変動や外乱に対しても安定して動作するロバスト性が求められる。
- 指令応答特性:効率向上のための指令応答特性を上げる必要がある。
これらは本来相反する要求で、大型ロボットを高精度・高速で動作させるにはこれらの相反する要求を独立して設定するための自由度を持った制御方式が必要となります。これは従来のPID制御のようなパラメータ調整型制御では不可能であり、ニデックインスツルメンツでは制御対象を数学的に表現し、数学的に表現されたモデルに合った制御アルゴリズムを設計するという現代制御理論に基づいて新たな制御方法を開発しました。しかも、ロバスト制御の観点から、制御対象の詳細なモデル化ではなくラフな数式モデルで表現し、不確かさや変動分は設定した周波数帯域でロバスト性を発揮する外乱オブザーバ補償機能によって安定化させる方式を考案しました。その上で、閉ループ特性を機械特性に応じた希望モデルに合わせ、さらにフィードフォワード制御により指令応答特性を改善しました。この際にモデルマッチングさせた閉ループ特性に基づくフィードフォワード補償をかけることで指令応答特性も自由に設定が可能となりました。