製品情報
FAシステム製品
ニデックインスツルメンツのFAシステム製品についてご説明いたします。
ニデックインスツルメンツは、液晶基板搬送ロボットや半導体用ウエハー搬送ロボットの他FA自動化システムを提供しています。FPD製造装置用のローダアンローダやCF、PI工程、ODF工程のインラインシステムを自社の液晶基板搬送ロボットと合わせて提供します。FPD製造後工程の分野では、様々な形状のFPDモジュールに対応した自動点灯、自動検査を行う検査の自動化システムを提供します。
M-CONTactTM シリーズ
FPDモジュール自動点灯検査装置及び周辺設備
FPDモジュール自動点灯検査装置
FPDの後工程は生産品種が多岐に渡り、工程の標準化が非常に難しく、現在も人の手による作業が伴う部分も多くみられます。ニデックインスツルメンツはこの問題を解決するため、生産工程で完成に近づいていく過程のモジュールの動作確認、検査を全自動で行う為に必須な機能として、シグナルインターフェースに自動コンタクト可能な点灯検査装置 ”M-CONTactTM” seriesをご用意し自動化へのお手伝いを致します。

M-CONTactTMの基本コンセプト
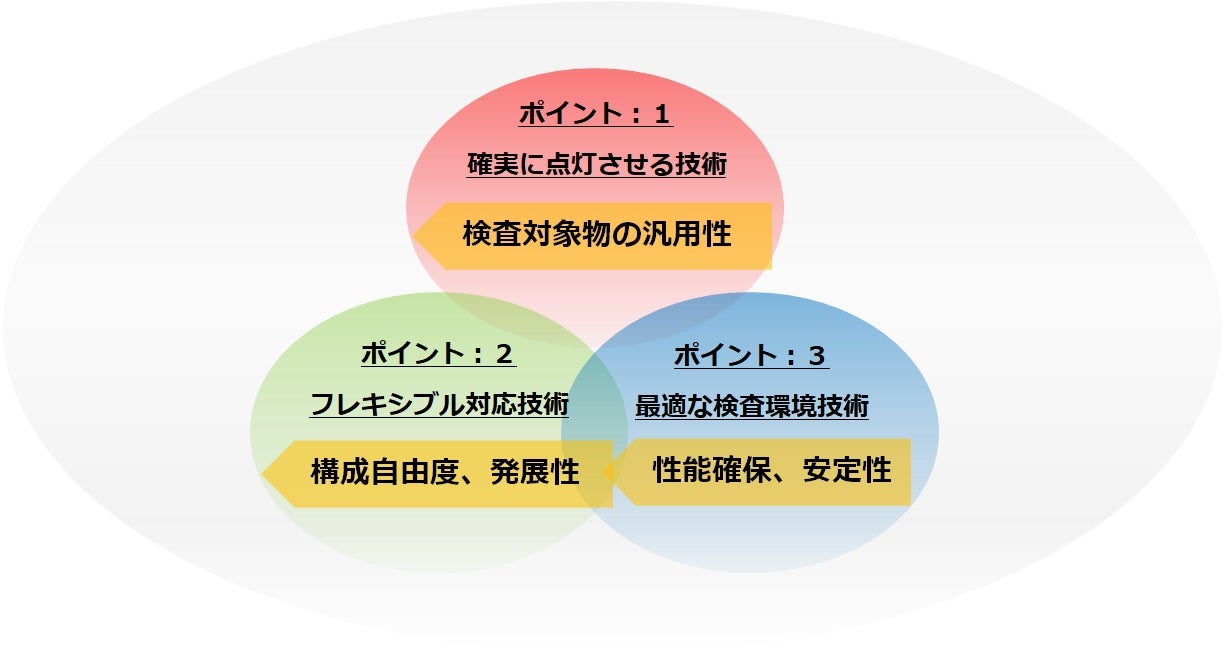
「点灯不良にお困りではないですか? 確実に点灯させるための技術で解決いたします」
確実に点灯させる技術
様々な製品形状、構造及び インターフェースに対応する為、多彩な形状に対応可能な 画像処理 コンタクトユニットを搭載することにより確実な自動点灯検査を実現させます。FPC、各種コネクターなどへの自動コンタクトでお困りの場合はご相談ください。
「自由度、発展性をコンセプトに、多品種少量生産の自動化、省人化、設置スペース効率化を実現します」
フレキシブル対応技術
多品種少量生産に対応する為に切替治具関係の最小限化を行い、段取り時間短縮を実現します。治具は設計標準化によりお客様側で製作対応可能です。現在ご使用の治具もご相談により装置化対応致します。装置サイズ小型化によりニーズに合わせた装置レイアウトへフレキシブルに対応します。またオプション追加により検査を含めた点灯プロセス※に対応可能です。※ムラ検査、輝度色度測定、OTPなど
「誤検出などにお困りではないでしょうか?検査に必要な最適検査環境を提供します」
最適な検査環境技術
画像処理に必要な最適な徹底した暗室環境、光学環境及び調整機構で対応します。異物、傷などの要因による 過検出防止機能を搭載しています。撮像時の振動対策も考慮した装置設計となっております。
自動コンタクト技術
点灯検査に必要な技術として重要な「確実に点灯させる技術」をニデックインスツルメンツでは保持しています。
もとより保有している自動搬送技術や画像処理により、さまざまなコネクター形状、ケーブルを繊細にハンドリングし、その形状を確実に位置認識し、信号を通信する為のプローブユニットへ確実にコンタクトさせることが可能です。



製品一覧
M-CONTactTMシリーズ
FPDモジュール自動点灯検査装置
型式表示方法
| Type | - | PK | - | 1 | - | C120 |
| : | : | : | ||||
| Type | 機種名 | 処理枚数 | カメラ仕様 | |||
| Type | PK:P検 MH:M検開き MT:M検閉じ HT:M検開閉複合 |
1:1枚取り (8~15.6インチ) 2:2枚取り (1.5~7インチ) |
C120:120M Camera C151:151M Camera C250:250M Camera |
|||
| Series | 仕様 | 製品データ |
| Type-PK-1-C | パネル検査 カメラ1 セット | ▼ |
| Type-PK-2-C | パネル検査 カメラ2 セット | ▼ |
| Type-MH-1-C | モジュール開き検査 カメラ1 セット | ▼ |
| Type-MH-2-C | モジュール開き検査 カメラ2 セット | ▼ |
| Type-MT-2-C | モジュール閉じ検査 カメラ2 セット | ▼ |
| Type-HT-2-C | モジュール開閉複合検査 カメラ2 セット | ▼ |
FPDモジュール周辺装置

| Series | 仕様 | 製品データ |
| ローダアンローダ | トレー段積、段バラシ、対象ワーク給排 | ▼ |
FPD製造装置ローダアンローダ及び搬送システム
ローダアンローダシステム
当社のFPD搬送ロボットを使ったローダアンローダシステムを提供します。
液晶基板製造工場で、ARRAY、CF、CELL工程でインデクサやインラインシステムの納入実績があります。
各工程では、カセットステージ、基板のアライメント、旋回ターン、基板を天地反転するターンオーバー等のユニットが必要になり、必要に応じた専用のユニットを含めて ラインを構築します。
参考例 CELL ODF工程





(貼り合わせ後)

-
8世代のロボットを使ったローダアンローダ装置

-
ワイヤカセット+コンベアロボット+トランスファロボット組み合わせによる装置へのパネル供給システム
「自社の大型液晶ガラス基板搬送ロボットにて最適なレイアウトでのインラインシステム構築を提案します」
当社の大型液晶ガラス基板搬送用ロボットは、大型基板搬送に対応した剛性を持ち、ロボット本体部の軽量化やモーターのパワーアップにより高速動作が可能です。炭素繊維強化プラスチック(CFRP)を採用しフォーク内部を中空構造としフォークの先端部を幅、高さ方向にテーパー化したダブルテーパー構造として軽量化を図っています。CFRPは繊維の方向、形状で剛性が変化する材料であり形状と繊維方向の組み合わせを工夫することで軽量、高剛性に適した構造としており、CFRPハンドを採用することで、高速、高精度、低振動の搬送が可能となっています。 クリーン対策についてはロボットカバー内部には発塵原のタイミングベルト、ボールネジ、リニアガイドが入っていますが、排気ダクトによる密閉内吸引はせず(大型化したロボットでは、本体内に負圧を発生させるに十分な流量を確保できるダクト径が取れません、またロボットの密閉度をかなり高くしても内部の発塵が蓄積され長時間クリーン度を保つのは困難です)、発塵箇所に近い位置にファン付のフィルターユニットを取り付け十分な負圧を発生出来る排気構造を採用しています。アーム部に使用しているベアリングは接触型シールとラビリンス構造を採用しています。
ユーザー要求であるフットプリント低減に対して、ロボットのアームを水平に配置せず、支柱を軸として上下に重ねて配置する構造とし、水平配置と比べ 1アーム分の旋回半径しか必要としないため、占有面積削減が可能となります。しかし上下にアームを配置した場合、上側のアームの可動部から発生するパーティクルが下側のアーム上のガラス基板への汚染が考えられますが長年にわたる経験で培ったノウハウを生かしたクリーン化技術により、高い防塵性を実現し他社ない上下配置アームの採用を成功させました。
当社のロボットは省電力を基本的なコンセプトとし、モーターパワーに依存しないメカ機構構造となっています。 Z軸に屈伸型構造を使ったものは、姿勢位置によりモータ軸の負荷が変化します。
動作時の消費電力の変化は無いが、液晶製造工程で使われるロボットの場合1サイクル動作時間の中で60%は上下軸が停止して使われるため、屈伸型は姿勢の保持が必要なためモータサイズが大きくなります。
当社では、姿勢によるモータ軸負荷の変化のない直動軸を上下軸に採用して省電力化が可能です。
メンテナンスについては、低位置でのメンテナンスが可能な位置に機構部品を集め、高所作業を極力排除した構造としています。駆動部の減速機とサーボモータをユニット化し、交換時の調整要素をなくすことでメンテナンス性をより向上しています。また高信頼性の汎用コントローラを採用しメンテナンス部品の共通化によりサポートの最速の提供が可能です。 ロボットコントローラは、現代制御理論に基づく低次元ロバスト極配置制御技術を採用し低振動かつ高精度の駆動を可能とし高い繰り返し精度と安定性を確保している。ガラス基板の大型化に対応し制御機能面ではスムースストップ機能や動作エリア制限機能の安全性を確保できる。コントローラーのハード面では、安全性機能強化(EMO,EMS時のスムース停止機能、非常停止2重化、非常停止スイッチ故障検出、ブレーキ回路故障検出等)とフィールドバス機能の拡充、メモリ容量大幅アップの機能向上を図っています。
以上が当社のシステムに採用しているロボット説明です。このロボットの採用と合わせ様々な周辺装置ユニットや制御システム提案によりお客様のご要求にお応えし最適なインライン装置を提供いたします。
「3D仮想ロボットの机上動作シミュレーションにて、ご要望タクトに最適な装置レイアウトを提案します」
3D Analyzerは、コントローラのみを使い実際のロボットの替わりに仮想的なロボットの動作をシミュレーションするもので単に指令レベルのシミュレーションではなく、ロボットの簡単なダイナミクスもシミュレーションすることができます。実際のロボットに設定されているパラメータファイルをそのまま使用することでそこに定義されたロボットをシミュレーションすることが可能となります。 機種別のパラメーターファイル(HWDEFファイル)を変えるだけで各種のロボットに対応ができ、ティーチングペンダントの操作も実機と同様に使用するこも出来ます。各軸の座標モニタやJOG動作、教示操作等も可能となっています。仮想的なロボットの動作をPC上で3Dアニメーション表示ができ、色々な角度から見ることもできます。 PLCからの制御にも最終製品用に開発したロボットプログラムそのものを使用することが可能で、実機検証前に机上で確認することができ開発効率が大きく向上しています。実機との時間誤差は、ほとんど無くロボット導入前のタクト検証に非常に有効なツールです。仕様検討の段階からこのシュミレーションを活用して最適ラインの確立にお役立て頂けます。 また、すでに稼働しているロボットから動作データを取得も可能で、そのデータ活用してPC上での動作のリプレーも可能です。 動作波形と合わせて確認することで、無駄な待機時間や当社特有のオーバーラップ最適化の検証にもお使え頂けます。
「ガラス基板たわみシミュレーションにて最適なハンドリング条件を算出、装置や周辺装置やロボット取り合い決定に貢献」
ロボットハンド上や取り置き場所のガラスの状態をシュミレーションし最適なハンドリング条件を算出する場合、汎用FEMソフトANSYSによるシェル要素を使った解析が有効です。ガラス板を数箇所の支持材上置いたときのガラス板が自重によりどの程度たわむかをモデル化し、ガラス板形状、材料特性条件を変え、重力加速度をガラス全体に荷重与えた条件で計算し、たわみによる変形、応力発生の表示、任意の断面におけるたわみを求めることができます。 搬送ロボットのハンド(エンドエフェクタ)設計、ロボットのアクセス装置との取り合い検証に貢献致します。
「IoTによる全体オートメーションの構築を提案します」
設備の稼動状況モニタ・CIMデータなど工程の情報をネットワークに上げ全体オートメーションの構築を提案します。 現有構築された工程情報をCIMPCから上位に送信するところまではそのままとして、監視カメラ、静電気モニタ等の監視センサーを接続し、上位に上げる機能を付加して対応します。ロボットの予防保全管理とパラメータ管理をCIMPCにてデータ処理を行い、設定入力・報告表示を行います。上位への報告は、BC(MasterPLC)など経由での報告し、報告項目・リンク アドレス・報告タイミング等の詳細は打合せにて取り決めます。状態監視報告について、ESD・電力・カメラ等の状態監視は、ローダーに機器を設置し、ネットワーク経由でホストへ報告します。
CIM対応
CIMPCによるインラインのトータル情報管理、ローダマスタ、BCの各種CIM対応を含めた制御システム及びそれらを実現するための装置間インターフェースをご提供致します。
ニデックインスツルメンツ標準 装置間インターフェース仕様 CIM対応ネットワーク例
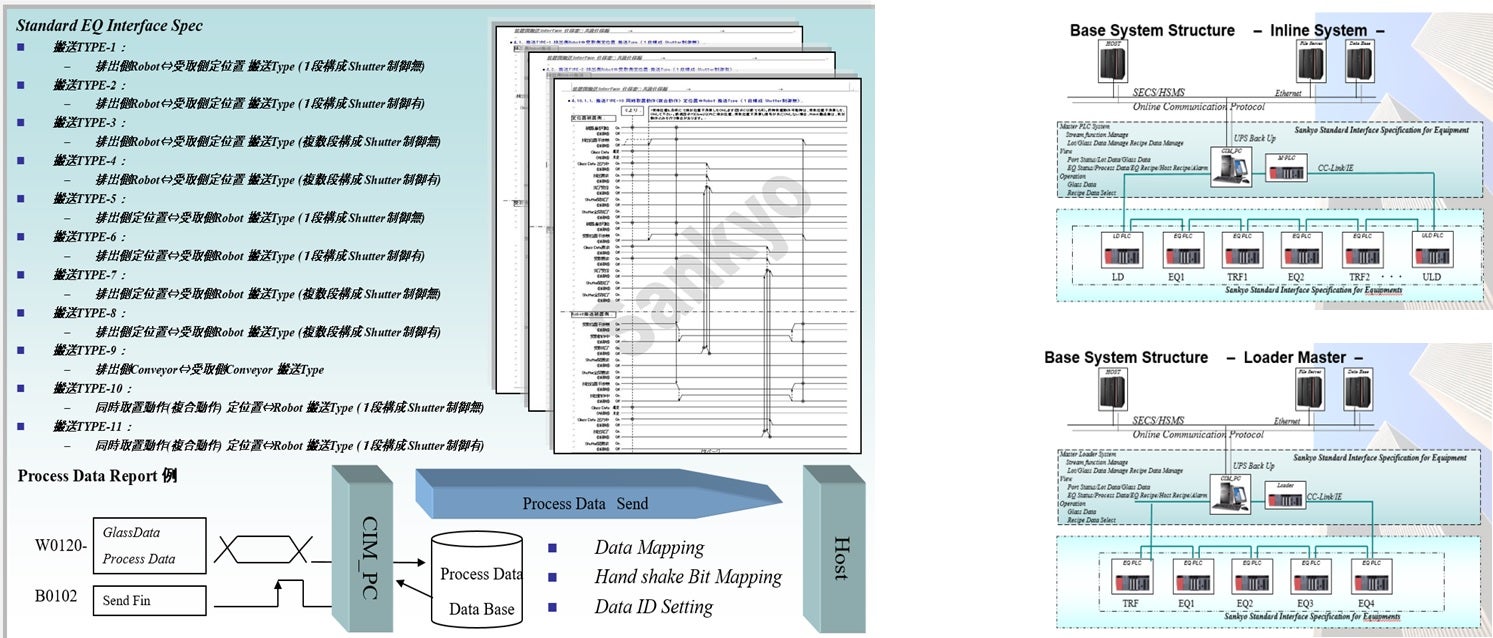
装置間インターフェース提供フロー例

「高い実績を誇る、装置間の通信や情報収集、管理を含む装置間インタフェース仕様を提供」
各ラインに合わせた、ネットワークの構築を当社の標準仕様を用いることにより行い、情報管理のニーズに合わせて、装置間インターフェース仕様を作成致します。 装置間のハードウェア、ソフトウェアのインターフェース個別確認や、装置メーカへの共通仕様説明をはじめとし、CIM情報報告に関する仕様説明など、各装置メーカの担当者と打合せを実施します。 装置メーカとの個別打合せにて、特殊装置との固有インターフェース仕様を提供します。
「安定稼働にに向けてのFABでの装置インターフェースも確実な確認を実施」
チェックシートに従い、各装置単位でのインターフェース確認を、現場実機にて実施します。 FABテストの前に、シミュレーション環境を用いて疑似的にインターフェースのシミュレーション確認を行う事も可能です。 装置情報の状況調査取りまとめや、ホストPCとのオンライン通信テストを現場実機にて実施します。
「わかりやすいマン・マシン・インターフェースの提供」
装置状態をリアルタイムで視覚的にわかりやすく表現します。 通信ログ、信号変化ログ、エラー履歴など、豊富なロギング機能を持ち、トラブル解析に寄与します。 必要に応じてログをファイル化して取り出す事も可能です。
お問い合わせ先
ニデックインスツルメンツ株式会社
メールでのお問い合わせ
お電話でのお問い合わせ
03-5740-3000
受付時間: 9:00~17:30(土日祝除く)