モータ用語集
ハンドロボット
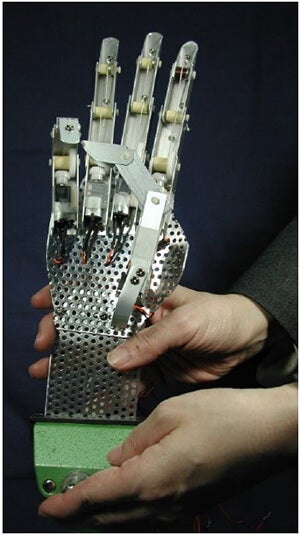
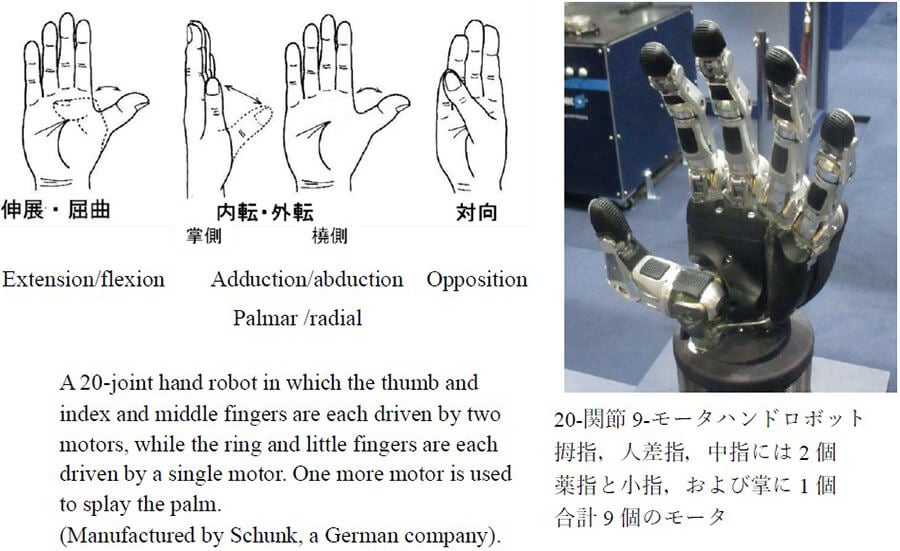
人の手の機能は豊富であり,その一部をモータと機械部品の組み合わせで代行する装置がハンドロボットである。人の指の動きは,親指は除いて,腕にある筋肉と筋でなされる。上の写真は各指にギアヘッド付きDCモータ,弦,傘歯車およびトーションバネを使って指の屈伸をロボット化するための教材としてのハンドロボットである。下図は指の動き表す専門用語である。下の写真はSchunk社製ハンドロボットである。
は行 の用語
- バイファイラ巻線
- 歯車
- バックラッシュ かみ合い隙間
- 波動歯車減速機
- パルス幅変調
- パワーウィンドウモータ
- ハンドロボット
- ヒステリシスブレーキ
- ヒステリシスモータ
- ヒステリシスループ
- ヒステリシス小ループ
- ヒステリシス損失
- 秒速(1秒当りの回転数 rps)
- ファラディの法則, 電磁誘導, 起電力
- フィードバック, 帰還
- フィードフォワード制御
- フェライト磁石
- フライバックダイオード
- ブラケット, エンドプレート, フランジ
- ブラシ, ブラシ保持器
- ブラシレス直流モータ,ブラシレスDCモータ
- ブラシ付きDC(直流)モータ
- フランジ
- プリントモータ
- フレミングの法則
- ブロック線図
- 分速(rpm)
- 分布巻
- ベクトル線図
- 偏差 誤差
- ペンタゴン結線
- ペンタゴン理論
- 扁平(型)モータ
- 放熱器
- ポール
- 保持力
- 保磁力 (抗磁力)