2-3-3 感应马达的特性
如第1章所示,旋转磁场型马达的同步速度取决于下面的公式。
![]()
NS:同步转速(分速)[rPM] N0:同步转速(秒速)[rps]
f:电源频率[Hz] p:马达极数
转差率
思考感应马达动作时,转差率是其中的重点。为了在线圈中产生电流,线圈需横穿磁场。
因此,磁场与线圈之间需存在相对的速度差。
因为该速度差,马达会以稍慢于同步速度的速度旋转。
将与该同步速度之间的速度差称为转差率,以s表示。转差率s使用下面的公式表述。
![]()
N:转子转速[rpm] NS:同步转速[rpm]
转差率通常表述为百分比,动力用感应马达的转差率为额定负载运行的2~3.%。如果是小型单相马达,则值会稍大一些。
转速与扭矩
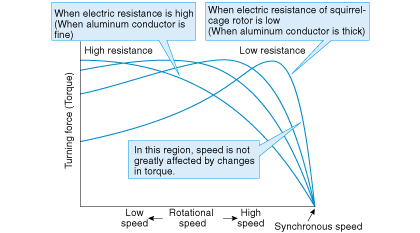
图 2.40 表示感应马达的特性。设计成转子的铝导体电阻变小的马达在高速区效率会提升,设计成电阻变大的马达在低速区的扭矩会增大。
电阻小的马达在特性曲线的最大扭矩右侧区域,即使负载增大,速度也只是稍微下降,扭矩在增大后稳定。
即,这种马达即使负载变化,速度也几乎不会变化。
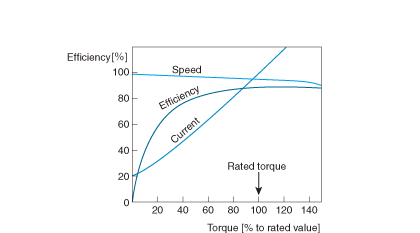
将横轴设为扭矩,纵轴为转速绘制这种马达的特性,再加上此时的电流和效率,则变成图2.41。
将该曲线与之前的直流马达特性进行比较,则会发现感应马达有以下特征。
- ●负载变化后,扭矩会发生相应变化,但速度没有大的改变
- ●扭矩与电流的关系不是直线