第五讲 距离机器人仿人手动作又近了一步 超声波马达
马达的种类非常丰富,根据其不同用途,可以制作不同型号和性能的马达。我们称其中大部分通过电流和磁力相互作用产生驱动力的,总称为电磁马达。此外,还有静电马达和超声波马达两种。在上一专辑的最后,我们曾提到,定子和转子之间不存在空隙的马达被称为超声波马达。
在这里,我们通过对三种马达的比较,着重具体介绍一下超声波马达。
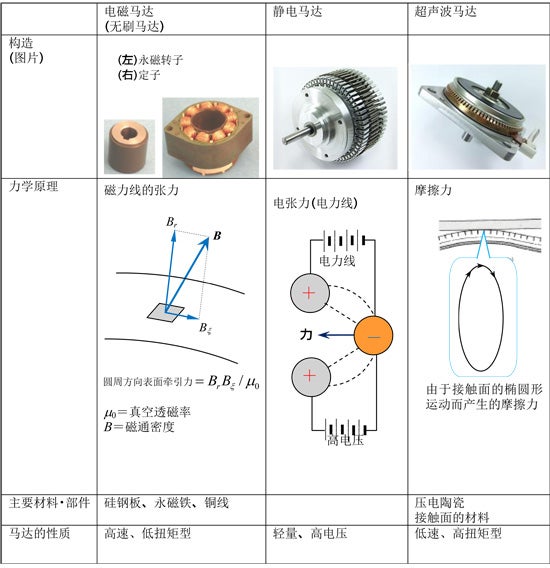
表1中,我们用图表的形式,对三种马达进行了比较归纳。在电磁马达中,我们选取其中代表,即使用永磁铁的无刷马达来介绍。静电马达也有很多种,在这里我们主要介绍一种由指田先生开发,并取得广泛应用的静电马达。
虽然对电磁马达的转动力或扭矩的原理解说有很多种,我们在本文中按照磁力线沿垂直稍微倾斜的方向穿入永磁铁转子表面,磁力线与磁铁表面产生切线力,从这一角度进行说明。切线力与径向成分![]() 和切线成分
和切线成分![]() 的乘积成正比。定子线圈的电流决定切线力的大小。
的乘积成正比。定子线圈的电流决定切线力的大小。
较之电磁马达,静电马达尚未被广泛应用,其理由之一是,正负电极间需要高压电场的作用。因为高压电的关系,如果在非真空状态中绝缘体破裂,会发生漏电和吸附大量灰尘,这是其缺点。所以,静电马达主要研究开发其在真空状态下的使用用途。
三种类型马达的相似点和不同点
电磁马达和静电马达的相似点是都可以在真空或者空隙存在状态中产生扭矩,进行运转。相对于此,如表1右栏的结构图所示的超声波马达,是通过转子和定子的接触面产生摩擦力来运转的。
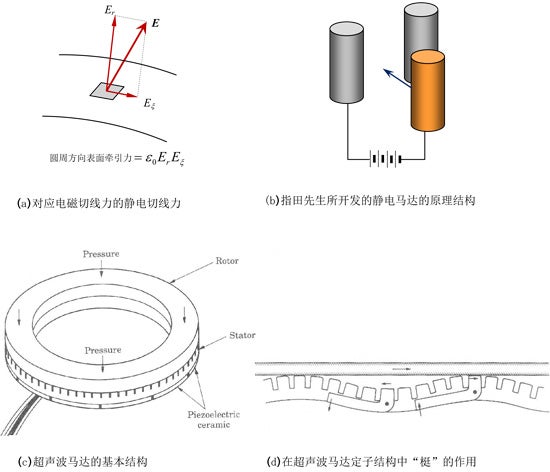
静电马达和超声波马达的共同点是都不利用磁场运转。超声波马达使用在电场中会产生伸缩特性的压电陶瓷,其基本特性与静电马达相似。所谓的压电陶瓷(piezoceramics),是瓷器的一种,既是非常坚硬的绝缘材料,又可以在微弱的电压的作用下发生伸缩。利用压电陶瓷的这种特性,可以使其在金属环表面产生椭圆振动轨迹。图1(c)补充图中,所展示的正是压电陶瓷薄片在超声波马达的基本结构中所处位置。根据指田先生的研究发现,外加电压的频率作用在超声波领域,产生金属共振,使其发生位置变化,并不只是单纯的伸缩,而是引起波动。之所以在定子金属环上采用切口设计,是为了使接触面在←→方向上的椭圆运动轨迹扩大,如图1(d)所示。
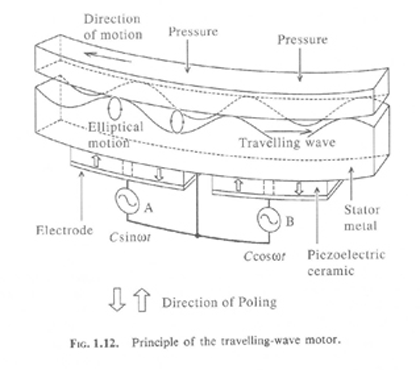
图2中所示,与其说是原理图,不如说是一个概念图,就是如果给2组压电陶瓷A和B分别外加![]() 和
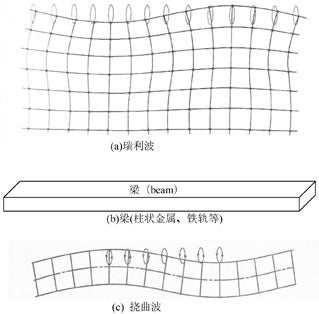
和![]() 2相交流电压,环形表面产生顺时针方向或逆时针方向旋转的横波和纵波。指田先生在发明的过程中,应该是以瑞利波为原形而构想到的。瑞利波的形状像地震震动一样,在地表和厚金属表面产生的波动,可以参考图3的示意图。现在的超声波马达是利用传导到金属薄片的挠曲波。
2相交流电压,环形表面产生顺时针方向或逆时针方向旋转的横波和纵波。指田先生在发明的过程中,应该是以瑞利波为原形而构想到的。瑞利波的形状像地震震动一样,在地表和厚金属表面产生的波动,可以参考图3的示意图。现在的超声波马达是利用传导到金属薄片的挠曲波。
关于MEMS
小型电磁马达也被称为微型马达。主要应用于机器人手指驱动、腕表指针驱动、手机震动等领域。但是,要想制成直径或者长度小于1mm的电磁马达,难度很大,即使完成卷线,效率也不高。相较于此,静电马达具有小型高效率的特征。作为MEMS(微机电系统,Micro Electro Mechanical Systems)中关键部件的超微型静电马达越来越受到关注,势必形成大型产业发展趋势。MEMS采用半导体的做成方法,以硅为材料制成,也不需要很高的驱动电压。
MEMS按照用途,把静电驱动器用于喷墨打印机的微型喷头,利用压力变位产生的电压,应用于压力传感器、加速传感器、流量传感器、硬盘驱动器(HDD)磁头、用小镜控制光线切换的光开关等诸多领域。
超声波马达的特征
超声波马达是利用机械的摩擦力的传动装置,在持续转动中其使用寿命受到限制。因此,发现其在非持续转动中的应用,可以利用超声波马达以下的5个优点。
(1)无需齿轮制动,具有低速、高扭矩特性,并具有高度可控性。
(相对于此项特点,虽然电磁马达为了提高效率,采用了高速、低扭矩的设计,但按使用要求可以安装齿轮等减速装置来实现低速、高扭矩的特性。)
(2)运转安静
(无需齿轮等减速装置,因其振动声音产生在超声波领域,在可听范围内不产生电磁噪音。)
(3)适用于小型马达,具有轻、薄、短、小的特点
(相较于电磁马达越小效率越低的特性,超声波马达可以实现小型且高效率的特性。)
(4)不受外界强磁场的影响
(适用于医疗器械MRI的投入造影剂用驱动器。)
(5)可制成中空结构
(适用于照相机的自动调焦装置。)
三种马达的比较
曾经在2010年前后,去指田先生的公司(新生工业)拜访过他本人,就三种马达的特长进行过一番讨论。那时,我们也谈论了NIDEC(尼得科)马达基础研究所开发出来的F5B用无刷马达。
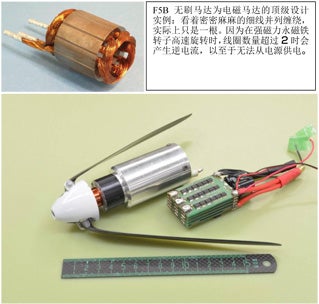
24V电源提供300A的流量。
在电磁马达中,占绝大多数的是驱动用大型马达和中型马达。那么,如何把马达做得既小型轻量,又能够输出大功率呢?正是源于这一课题,1976年指田先生发明了超声波马达。在那时,也就是约40年前,小型电磁马达的功率还很低。图5所示是楔型超声波马达的结构图,正是现代超声波马达诞生前,指田先生的发明。这在当时是一种输出功率很大的马达。
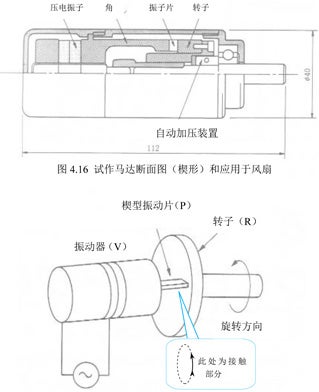
振子片(楔子)的前端在超声波频率的
作用下呈椭圆形运动,
只有图中所指示区间接触转子圆盘。
笔者认为,较其他顶级设计,在重量对输出功率比上来看,这种电磁马达是超越了超声波马达的。此后,指田先生又把研究的热情投入到静电马达的发明中,他希望发明出一种既能够连续运转又轻量的马达。因为电磁马达是要在磁场中通过铁芯和电流的作用而驱动的一种马达,其中铜的重量是占很大成分。而静电马达在材料使用发面,理论上能够达到轻量化的目的。
不管是电磁马达,还是超声波马达,都很难在真空状态下运转。因为电磁马达必须要把线圈和铁芯所产生的热量散发掉,才能正常运转,这就需要即时冷却,最简单的就是用风吹散热的办法,而在真空状态下是无法实现的。在超声波马达中,因为金属要和滑块接触,而在真空状态下,金属和金属接触时有可能粘结在一起,而实际上要选定一种在真空状态下仍能正常运转的材料并非易事。
相较于此,静电马达的优点在于其发热部少,属于高效率马达。
综上所述,我们概括出以下几点结论。
(1)虽然马达类型丰富,但就其种类(各种各样的特质)来看,电磁马达仍占绝大多数。
(2)超声波马达和静电马达可以作为电磁马达的补充,但取得实际应用的类型还较少。
(3)超声波马达适用于不使用减速装置就能够瞬间降低转速并输出高扭矩的实用要求。其主要应用于照相机的自动调焦装置中。并且尤其适用于强磁场环境中所需的驱动装置。比如,MRI的投入造影剂用驱动装置(注射)。
(4)静电马达适合在真空状态中使用。
结束语
指田先生发明超声波马达的契机是因为当时没有能够驱动人手或适用于机器人驱动的小型强力马达。虽然超声波马达应运而生,但能够驱动机器人手指用的马达尚未开发成功。
要想实现手指驱动装置,我们必须要等待一位以此为毕生研究目标的天才科学家的出现。下次的专题,我们将介绍“半导体元素的发展带来新型马达的诞生”。然后,再选取手指驱动器这一研究课题加以介绍。

(摄于1990年左右)
在笔者与马达相伴的人生经历中,遇到过形形色色喜爱马达的人。而其中对马达一直怀着非凡的执着信念的人,只有两位,一位是创立NIDEC(尼得科)集团的永守重信先生,另一位是发明超声波马达,并使其商品化的指田先生。我还依稀记得在1983年的小型马达技术论坛上,两位作为发言者登场时,在能容纳300人的会场内那种热情洋溢的气氛。如果查一下各国的工业史,大家可以发现在每个国家工业繁荣的时代,肯定会有卓越的马达发明家和企业家出现。而说到日本的马达史上,这两位正是其中的代表人物。
我作为那次研讨会的企划委员长,曾经有幸在1981年拜访过坐落在芦花公园方向、环状8号线边上得新生工业,就在那里我第一次见到了“活生生的物理学家”。当时,他带我看了他命名为“楔形马达”的马达电机在强大功率的驱动下,带动风扇的螺旋叶片飞速旋转,那种情景至今仍记忆犹新。第二年,当我再次拜访指田先生的时候,他又给我展示了被称为“行波型”的新型马达机种。他经过对物理教科书上提到的瑞利波的横波纵波现象的考察,又研究了材料力学中梁的振动方式,想出利用压电陶瓷产生旋转电场,并引发旋转振动来驱动的方式,这种构思已经超出普通技术人员的所思所想,完全是可以和发现电磁感应的法拉第相媲美的物理学家。
这种马达制造需要进行精密的机械加工工艺,而指田的工作室是在一座陈旧的木造小楼的2楼,外面大型卡车接连不断地通过,当卡车通过时,地板就颤个不停。而指田先生正在用研磨机床磨制一个平面。他说,“工具并非是把物件制作得精密的必要条件,人类创造出精密物件的历史正证明了这一点。”指田先生时刻提醒自己,不要在不必要的地方花费不必要的经费。
在2010年,当他想把公司大门重新装修一下的时候,发现大门柱子都已经破烂不堪了。作为世界上唯一能制造医疗器械用超声波马达的制造商在这种环境下生产实在有些说不过去。所以,指田才下决心建了现在这座地下一层地上三层的新厂房。