解决方案案例
“便携式汽车”WALKCAR中的驱动马达
改进马达外壳结构、采用高密度绕组设计让“便携式汽车”构想成为现实
- NEEDS
- 可稳定行驶的小型代步工具
- SOLUTION
- 研制耐用性强、输出功率大、个体性能均衡的轮毂马达
当今,包括汽车、小型摩托车乃至滑板车等在内的各类代步工具都朝着电动化方向飞速发展。其中,一款具有“站立驾驶”及“四轮稳定行驶”等特点的电动“便携式汽车”凭其独特的创意与构思获得了市场的广泛关注。该产品形同一台13英寸的笔记本电脑,可放入背包中随身携带,行驶时最高时速可达每小时16千米。今后,如果道路交通法中的相关规定能得以放宽的话,该产品一定会成为人们日常出行时一款时尚、超前的代步工具
该款新型出行工具中搭载了一套由NIDEC ADVANCED MOTOR公司为其全新研制的小型轮毂马达。轮毂马达凭其独立驱动的特性,不仅可以实现车体结构设计的简洁化与小型化,还因其无需安装齿轮减速装置更大地提高了马达的静音性能与轻量化等诸多特点。
全面改进后的马达刚性与小型大功率输出性能完全满足该新款出行工具的技术要求
WALKCAR除了要确保产品自身的轻量化与小型化以外,还要充分考虑到承载一位成人时所需的动力性能以及是否能承受行驶中因路面的凹凸不平或上下路肩、盲道时产生的弹跳、抖动、撞击等外力的影响。为满足上述技术要求,NIDEC ADVANCED MOTOR伺服决定在原有轮毂马达的基础上,对马达的基本结构作了全面改进。
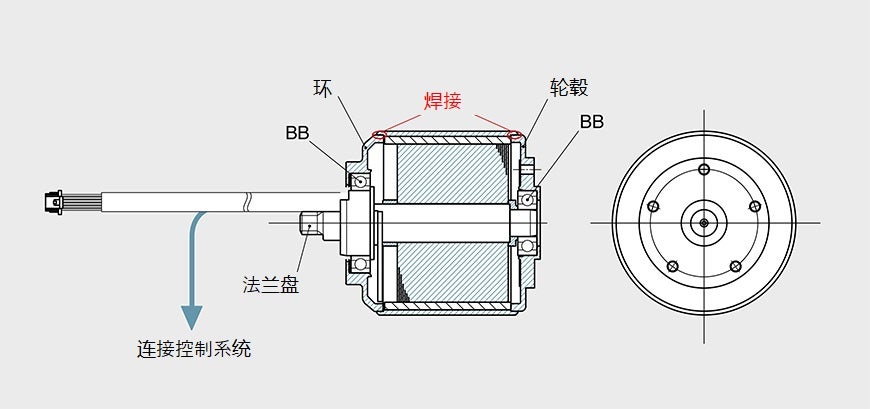
轮毂马达的内部结构一般分为可旋转的外转子与包括固定环在内的、起固定支架作用的底座这两部分。底座与外转子之间仅一处相接,受外力作用下转子的转速会产生偏差。
如下图所示,为了进一步提高马达整体的刚性,我们将固定环与轴承固定在一起,让固定环随轴承一起旋转。底座(固定部分)上只有法兰盘一个零部件,将固定化、轭套与轮毂焊接(一体化)在一起达到提高刚性的目的。
通过将连接固定轴的固定环与马达外壳的轮毂焊接在一起,让马达外壳与底座成为一个完整的旋转体,有效地提高了马达整体的刚性。
另外,为满足客户提出的将之前推出的直径为60mm、功率为30W的普通款马达升级为直径不变、功率为65W的大功率马达的要求,我们在以往10磁极、12槽绕组的基础上改用了密度更高的14磁极、12槽的高密度绕组设计方案。以此来加大磁通量达到提高转矩的目的,同时也可降低周期性出现的转矩脉动下降的问题。
高柔性电线的使用与转速偏差的减小为用户带来更加稳定与安全的操控感
为防止行驶中因震动导致接线断裂或内部磁块脱落等问题的发生,我们重新对使用的物料及生产工艺进行了改进。最后,在物料方面,我们决定使用柔韧度更高的高柔性电线;在生产工艺方面,我们自行制作专用工具并配合新的生产工艺,让胶水的涂布更薄更均匀。通过上述两项改进有效地提高了轮毂马达的耐用性。
WALKCAR是一种轴距极短、不足200mm的纯电驱动的代步工具。一般来说,代步工具的轴距越长,其直线行驶时的稳定性越高,但对于以轻便、小型为最大特点的WALKCAR来说,轴距受到了很大的限制。除此之外,WALKCAR在行驶时由前轮中的两台轮毂马达来驱动,一旦左右轮毂马达的转速出现偏差,WALKCAR将无法实现直线行驶。普通马达的生产工艺中,允许马达转速存在10〜15%的偏差,但为WALKCAR配套生产的马达则要求将转速偏差控制在5%以内。
为此,我们重新对马达内部的磁通量传感器的安装位置进行了调整。一般情况下,因该传感器的安装位置引起的转速偏差完全可以忽略不计,但为了满足WALKCAR的技术要求,我们通过加装专用治具以及精确监控程序自动检测仪,成功地将转速偏差控制在±5%范围内。
我们衷心期待通过上述各项改进措施研制而成的这款小型、轻便、耐用性强、大功率的轮毂马达将被更广泛地应用于无人搬运车、电动助动车、服务型机器人等各类代步工具中。