尼得科的技术实力
在真空环境下实现理想基板搬运的机械臂
即使是真空,也可以实现与大气中同等的自由度
在液晶面板和有机EL等显示器的制造过程中,始终需要更大的母玻璃基板和更快的加工速度,以同时做到降低生产成本与加大屏幕尺寸。近年来,随着价格竞争的加剧,母玻璃的尺寸越来越大,有时甚至达到3m×3m。尼得科集团提供在真空制造过程中搬运大型显示器的机械臂。
母玻璃基板上的薄膜加工和蒸镀等工艺需要极高等级的洁净环境,因此必须在真空环境中进行。在真空中移动的机械臂必须在每个关节中内置密封件,以防止空气和灰尘从手臂内部排出。由于密封件阻碍机械臂的动作,因此关节动作的自由度往往较低,但尼得科的真空搬运机械臂保证了与大气中同等的自由度。
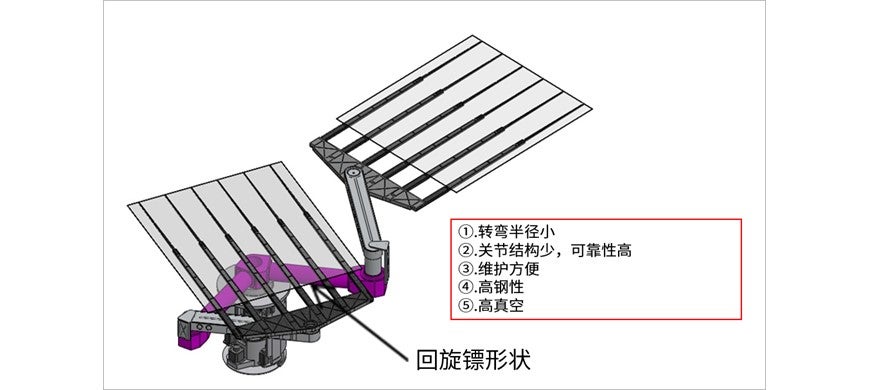
真空搬运机械臂有回旋镖式和SCARA式两种类型。回旋镖式的优点是转弯半径小,将产生灰尘的关节结构数量保持在最低限度以避免降低真空内的洁净度。
通过减速机一体化密封技术实现高真空
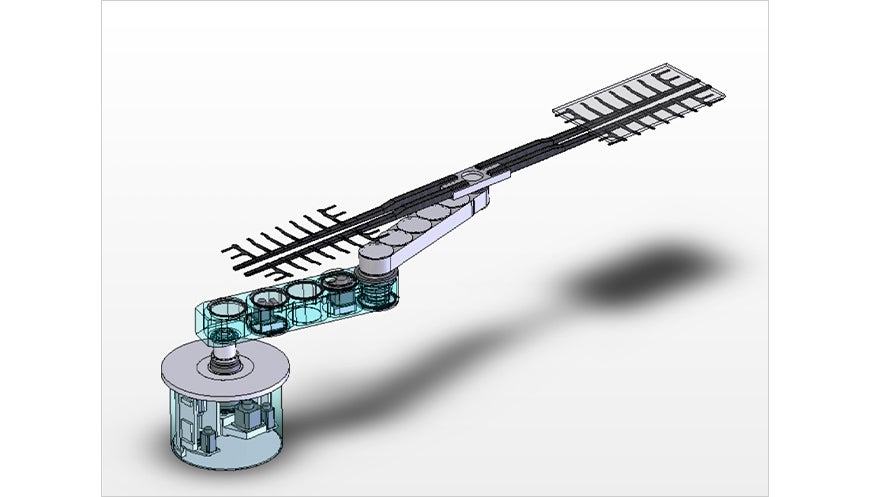
回旋镖式结构已被用于半导体制造过程中的晶圆传送机械臂。然而,显示器的母玻璃基板比半导体硅晶圆大得多,尺寸至少需要加大10倍。保证刚性是加大尺寸的主要难题。以往,通常使用传送带等来传递电机的驱动力,而这种方法会使结构变复杂,很难同时实现大尺寸和高刚性。
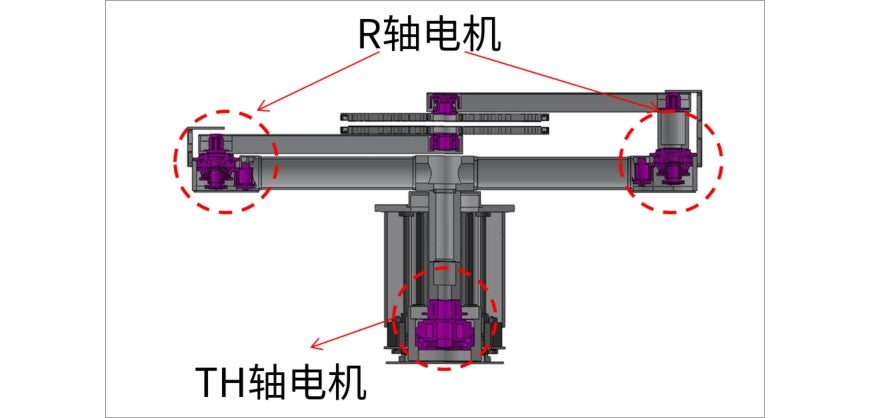
为此,尼得科采用了在每个关节中安装电机和减速机的方法。此外,我们通过使用与减速机一体化的磁性密封件,最大限度地减少了真空操作所需的密封件数量。减少密封件的数量可以提高钢性和动作自由度。通过减少需要与外界隔绝的位置数量,也实现了高真空。
然而,减速机容易聚集热量,因此温度管理是个难题。尼得科的真空机械臂通过手臂内的空气循环来管理整体温度。由于产生的热量因关节而异,因此通过根据不同热量提供散热片、调节空气流量来保持内部温度恒定。
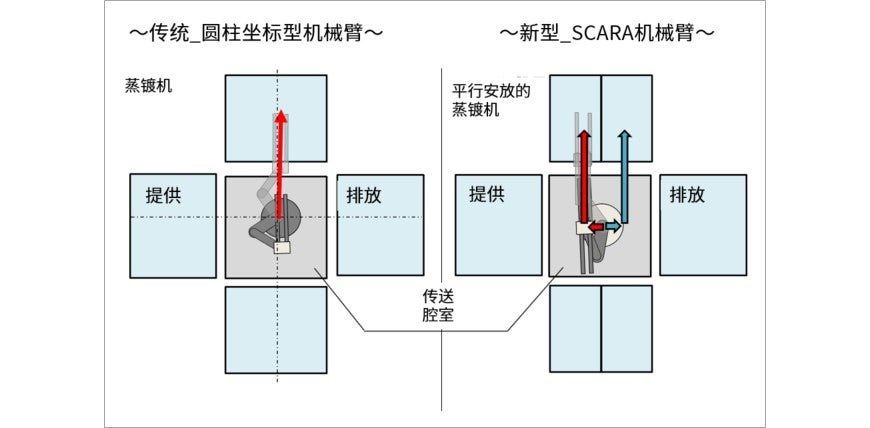
在有机EL的制造过程中使用的SCARA式机械臂的优点是手臂自由度高。尽管关节数量很少,但面板可以轻松移入或移出并排的两台蒸镀机,这十分有助于提升整个过程的效率。
在这里,我们也通过采用与上述减速机一体的磁力密封件,提高动作自由度,实现了高刚性和高真空。通过使用与回旋镖式相同的单元,还可以控制成本。
尼得科通过采用与电机和减速机特性相匹配的结构和设计,提供能够满足制造工艺所需性能的机器人与机械臂等解决方案。