尼得科的技术实力
向全新的伺服技术挑战
向构筑可对应大规模化、高精度化控制装置的全新伺服技术进行挑战。
生产一线的自动化带来了许多便利,加工、搬运、组装等所有制造工艺的自动化都在不断发展。在此自动化的过程中,制造技术作为自动化的核心也在快速发展。可如果机器人和自动设备等控制对象被要求控制的水平提升,则按照现有的控制技术无法达到所要求的规格,从而产生了仅对现有技术进行千锤百炼而无法对应的状况。
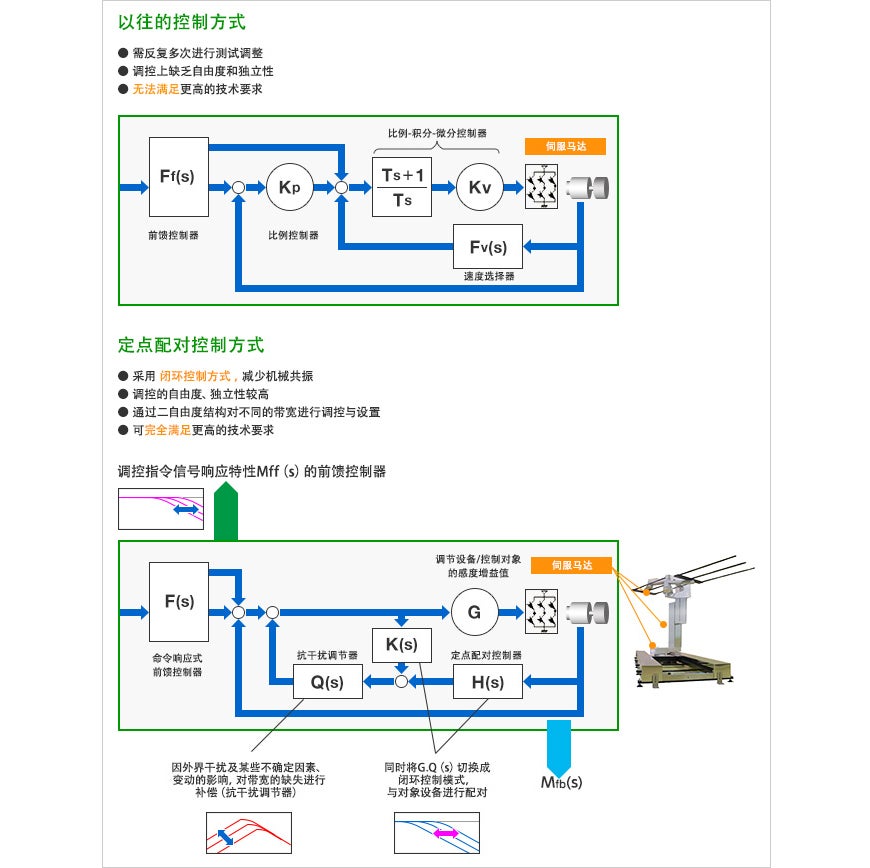
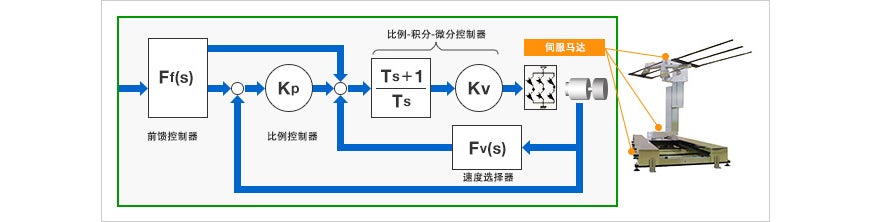
以往,主要用于控制机器人等的是一种叫做PID控制器的数控算法装置。控制系统对应满足的目标值和实际控制对象数值的误差进行P(比例)、I(积分)、D(微分)这3个项目的动作反馈和修正。采用未经过控制对象的严密验证而开始设计,边重复控制测试边反复试验调整控制器参数的方法。由于模拟/硬件控制装置在应答性方面也不存在问题,因此从飞机的自动操作到马达和油压系统等各种机器、汽车、石油化学、电力等各行业领域都得以广泛应用并独立完成了进化过程。但是,随着控制装置向大规模化和高精度化的方向发展,控制器的数量也随之增加,为了要反复进行试验,就需要大量的时间,而且也产生了不符合所需规格的情况。
有一种机器人是PID控制器不能适用的控制对象之一。Nidec Intruments对各种机器人进行了研发和制造,其中取得重大发展的是用来搬运液晶玻璃基板的机器人。液晶屏为了实现最终产品的大型化以及制造效率的提高,其的基材母版原玻璃的尺寸也在逐年增大,最新款已经比3个榻榻米还要大。为了搬运这种非常轻薄且大型的母版原玻璃,即使是搬运用的机器人也需要精密的控制。这是因为粗略的控制可能让原版母玻璃碎裂。这种搬运大型液晶玻璃材料用的机器人存在的问题是,它们会因为机械共振点的降低而变得容易晃动,根据手臂的伸缩动作以及有无负重,负荷会发生大幅度变动。尽管存在这样的课题,但为了提升生产效率必须要提高精度和速度。

为了使大型机器人能高精度地、高速地动作,需要满足以下规格。
- 闭环特性:需要使闭环特性符合(适合)降低的机械共振。
- 外界干扰应答特性:要求对较大的负荷变动和外界干扰也可以稳定运行的坚实耐用性。
- 指令应答特性:需要提高旨在提升效率的指令应答特性。
这些是与原有的情况相反的要求,为了使大型机器人能够高精度、高速度地运行,需要一种自由的控制方式来独立设定这些相反的要求。而采用以往的PID控制器这样的参数调整型控制器是无法做到这一点的。因此,NIDEC(尼得科)基于“以数学的方式表现控制对象,设计符合数学形式表现模型的数控算法装置”的现代控制理论,开发了一种新的控制方法。而且,从坚实耐用控制的观点出发,考量了这样一种方式,即,不通过控制对象的详细的模型化来表现,而是采用粗略的算式模型来表现,通过在已设定的频率范围内发挥坚实耐用性的外界干扰观测补偿功能,使不确定性和变动部分更加稳定。在此基础上,将闭环特性与符合机械特性的需求模型相结合,进而根据前馈控制改善了指令应答特性。此时,通过实行基于模型匹配的闭环特性的前馈补偿,也可以自由设定指令应答特性。